OPERACIONES
ELEMENTALES DE FOTOGRAMETRÍA ANALÍTICA
3.3.
MOVIMIENTOS EN EL ESPACIO
3.3.1
Matriz genérica
Sean los sistemas cartesianos (X Y Z) (X’ Y’ Z’) entre los que media una rotación de tal
manera que puede escribirse:
|
X’ |
|
R11 R12 R13 |
|
X |
|
X’ |
|
|
|
X |
|
|
Y’ |
= |
R21
R22 R23 |
* |
Y |
ó |
Y’ |
= |
R |
* |
Y |
|
|
Z’ |
|
R31
R32 R33 |
|
Z |
|
Z’ |
|
|
|
Z |
|
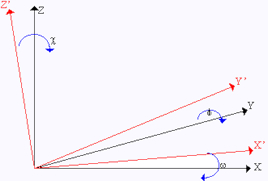
Una forma de llegar a la determinación de R es considerarla
función de tres parámetros básicos: los ángulos ω, φ, y κ entendidos estos como
los giros sucesivos y elementales en torno a cada uno de los ejes cartesianos
(OX, OY y OZ respectivamente) que deben producirse para obtener el giro global.
Esta forma de proceder permite tratar la matriz de rotación tridimensional R
como una composición de tres matrices de rotación bidimensionales.
Se entenderá como giro positivo aquel que haría avanzar un
sacacorchos situado sobre el eje en el sentido positivo del mismo.